|
|
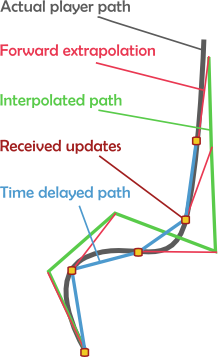
A question that often comes up is how to deal with the sharp jump
in position that results from immediately applying a received entity
position update when extrapolating entities in a networked game. One
solution is to always delay entity display by one RTT, so you always
know what you're moving towards. If that's not what you want for your
game, then you need to forward extrapolate. One way of doing that is
explained in this code (and is basically the same as used in the
Torque networkging engine, used for Tribes, AFAICT). A slightly
updated version of the code is found in the EPIC
Entity Position Interpolation Code library.
|
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
//! Interpolator can interpolate values for you over time, based on an
//! incoming stream of position/velocity/time triples. To avoid sharp
//! snapping, it interpolates along a line that's extrapolated from the
//! extrapolated positions of the last two updates. Each time a new
//! update is received, it additionally updates the interpolation line.
//!
//! View illustration.
//!
//! \param Val The data type of the value being interpolated -- typically,
//! a Vector3 in whatever library you're using.
//! \param Time The data type for times. Typically, seconds measured as
//! a float.
//!
//! \note Your Val type needs to support addition and subtraction with
//! itself, as well as multiplication by Time (which returns a scaled Val).
template<typename Val, typename Time = float>
class Interpolator {
public:
//! Initialize the behavior of the interpolator. You should typically
//! set calcAhead and displayBehind to an estimate of the latency of
//! your connection, and slopTime to the maximum time without updates
//! that you are willing to go before stopping the interpolation.
struct Settings {
Time calcAhead; //!< How far forward to extrapolate
Time displayBehind; //!< How far back to interpolate
Time slopTime; //!< How long without updates is OK
};
//! Construct the interpolator, giving it some initial values. Typically,
//! these will be taken from the first position/velocity/time packet received
//! for the entity.
//! \param init The parameters for interpolation (see struct Settings).
//! \param initPos The position that the entity starts out at.
//! \param initVel The velocity that the entity starts out having.
//! \param initTime The game time at which the pos/vel reading was correct.
//! Typically, this is the timestamp at which the sender sent the data.
Interpolator(Settings const & init, Val const & initPos, Val const & initVel, Time const & initTime) {
settings_ = init;
lastPos_ = initPos;
lastVel_ = initVel;
lastTime_ = initTime;
lastReturnTime_ = initTime;
lastReturnPos_ = initPos;
}
//! Update the interpolation with newer values. This is typically data
//! received from other players.
//! \param newPos The position of the player at game time newTime.
//! \param newVel The velocity of the player at game time newTime.
//! \param newTime The game time at which the readings were taken.
//! \note Interpolator will discard the values if newTime is earlier than the
//! last received game time.
//! \return TRUE if the data was not discarded.
bool update(Val const & newPos, Val const & newVel, Time const & newTime) {
if (newTime < lastTime_) {
// Discard updates that are in the past.
return false;
}
// The last returned datapoint was at lastReturnTime_. Use that to
// figure out where to start from. Note: if I receive an update that,
// when extrapolated, is behind the last returned time, the returned
// value starts getting very jittery. That means you aren't compensating
// enough!
if (settings_.displayBehind < 0.0001) {
// Avoid a divide by zero, but snap the player
lastPos_ = newPos;
lastVel_ = newVel;
}
else {
lastPos_ = lastReturnPos_;
lastVel_ = (newPos + newVel * settings_.calcAhead - lastPos_)
* (1/settings_.displayBehind);
}
lastTime_ = newTime;
return true;
}
//! Provide estimates of the position of the entity at the given game time.
//! \param outPos If not NULL, receives the estimated position at the given time.
//! \param outVel If not NULL, receives the estimated velocity at the given time.
//! \param atTime The game time at which to estimate the position (typically
//! later than the last received packet).
bool read(Val * outPos, Val * outVel, Time const & atTime) {
bool ret = false;
if (atTime < lastTime_ + settings_.slopTime) {
lastReturnTime_ = atTime;
lastReturnPos_ = lastPos_ + lastVel_ * (atTime - lastTime_);
ret = true;
}
if (outPos) {
*outPos = lastReturnPos_;
}
if (outVel) {
*outVel = lastVel_;
}
return ret;
}
private:
Settings settings_; //!< \internal Settings from initialization.
Val lastPos_; //!< \internal Last received packet pos.
Val lastVel_; //!< \internal Last received packet velocity.
Time lastTime_; //!< \internal Last received packet time.
Time lastReturnTime_; //!< \internal Last time returned at.
Val lastReturnPos_; //!< \internal Last position returned.
};
//! \internal Sample Vector3 used for testing
class Vector3 {
public:
float x, y, z;
Vector3() { x = y = z = 0; }
Vector3(float ix, float iy, float iz) { x = ix; y = iy; z = iz; }
Vector3 operator+(Vector3 const & o) const {
return Vector3(x+o.x, y+o.y, z+o.z);
}
Vector3 operator-(Vector3 const & o) const {
return Vector3(x-o.x, y-o.y, z-o.z);
}
Vector3 operator*(float f) const {
return Vector3(x*f, y*f, z*f);
}
};
//! \internal Read one data point (a simulated packet) from stdin.
bool read_line(Vector3 * op, Vector3 * ov, float * ot)
{
char line[1024];
again:
fprintf(stderr, "pos/vel/time> ");
fflush(stderr);
line[0] = 0;
fgets(line, 1024, stdin);
if (!line[0] || line[0] == 'q') {
return false;
}
if (7 != sscanf(line, "%f , %f , %f / %f , %f , %f / %f",
&op->x, &op->y, &op->z, &ov->x, &ov->y, &ov->z, ot)) {
fprintf(stderr, "error: input format x,y,z / x,y,z / t\n");
goto again;
}
return true;
}
int main() {
Interpolator<Vector3, float>::Settings setting;
setting.calcAhead = 0.2f;
setting.displayBehind = 0.2f;
setting.slopTime = 0.5f;
Interpolator<Vector3, float> terp(setting, Vector3(0,0,0), Vector3(0,0,0), -1);
float curTime = 0;
fprintf(stderr, "Input successively reveived data packets. Type 'q' to quit.\n");
Vector3 p, v;
float t;
while (read_line(&p, &v, &t)) {
terp.update(p, v, t);
while (curTime < t+0.15f) {
curTime += 0.05f;
terp.read(&p, &v, curTime);
printf("pos: %.2f,%.2f,%.2f vel: %.3f,%.3f,%.3f time: %.3f\n",
p.x, p.y, p.z, v.x, v.y, v.z, curTime);
}
}
return 0;
}
| |
|
{kind=link}